
 Malaysia
Malaysia Hong Kong
Hong Kong Indonesia
Indonesia Tiếng Việt
Tiếng Việt ประเทศไทย
ประเทศไทย
In July 2017, AAM completed a project to supply a mobile light detection and ranging (LiDAR) and imagery mapping system along with services for the creation, delivery and integration of 3D digital models of Singapore. Under the Singapore Land Authority, the project involved conducting a mobile mapping survey for over 5,000 kilometres of roads in Singapore and producing 3D models from the resultant dataset. The innovations and achievements of this project have seen it nominated as a finalist in the Municipal Operations category of Bentley’s upcoming Be Inspired awards to be held in Singapore from 10 to 12 October 2017. AAM’s project manager, Daniel Kruimel (DK), reflects on his experience in laser scanning and 3D modelling.
DK: My first experience of 3D laser scanning came in 2006, using one of the early commercial laser scanners to scan the façade of Adelaide’s historic railway station on North Terrace. The building is home to SkyCity Casino, which commissioned the scan for the purpose of heritage documentation and to aid in the design for future upgrades. 3D scanning was very specialised then, with only a handful of Australian companies having invested in the technology and even fewer people knowing how to operate it. Fast forward a decade and scanners have evolved into ‘another tool in the box’ for modern surveyors.
Advancements in both software and hardware have propelled laser scanning into the everyday tool that it is today. Let us first look at the hardware side. In my previously mentioned first experience, the laser scanner being used was a behemoth compared to today’s offerings. The instrument required two people to lift and a powerful laptop on site to run. Once set up, the individual scans themselves would take approximately half an hour (a series of individual scans are used to attain full coverage of the site). During this time, the surveyor would need to use conventional equipment (a total station) to measure accurate coordinates for targets that had been set up in the area of interest prior to scanning. These would then be used in post-processing to ‘register’ the point cloud; being the millions of individual points created through the laser measurements during scanning (refer to figure 4 for an example of a point cloud).
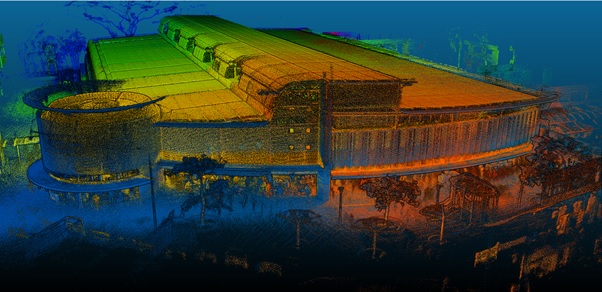
Figure 4: Point cloud produced from a handheld laser scanner
The final dataset produced was several gigabytes in size, which was quite large by 2006 standards! Most software applications were not able to handle the density of data produced from scanning, meaning even more time would be spent in the office to extract 2D or 3D computer-aided design (CAD) data from the point cloud to produce a deliverable that the client could work with. Jump ahead to today.
As happens with most technology, modern-day laser scanners are light years ahead of their predecessors. I am sure many people may be reading this article on a smart phone—take a moment to think back to the original mobile phones! Terrestrial laser scanners today are much more compact and able to be operated by a single user. Advancements in processing techniques have also reduced the need for pre-deploying and measuring targets. A technique known as ‘cloud to cloud registration’ enables individual scans to be joined together based on common objects. Factor in competitive pricing and scanners are a much more viable option for modern-day projects. The relatively simple operating interface is also seeing other professionals (not just surveyors) adopting and using this technology. Figure 2 shows an example of a modern scanning system.

Figure 2: Modern-day terrestrial laser scanner
With hardware constantly improving, there have been similar parallel advancements in software. Good software is needed to handle the vast amounts of data produced by the hardware and likewise, the software would not be of much use without large datasets from the hardware. A variety of software packages are capable of loading and visualising millions of points, allowing the point cloud to be used directly for many applications. There are still instances where models derived from the point cloud are required, but fortunately there are several programmes featuring semi-automated tools to speed this up. Figure 6 shows a 3D model produced from point cloud in a recent survey. Point clouds consist of millions of individual points and still require user interpretation to determine the different features such as piping, venting, cables etc. 3D models contain different layers and can also be used to fuse geometry with attribution. We have not quite reached the holy grail of full automation in 3D modelling yet, but it is an area of extensive research and there are advancements made year-on-year.
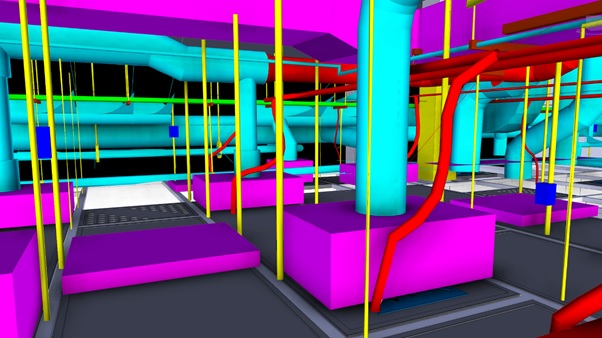
Figure 6: Highly detailed 3D models produced of complex as-built environments
Mobile laser scanning systems have further increased the applications for this technology. These systems can collect comprehensive datasets in a fraction of the time that it would take to use static (or stationary) based laser scanning techniques. Figures 1 and 3 show examples of a vehicle based mobile laser scanning system and a handheld unit. Whilst there is a trade-off in accuracy, it is extremely advantageous for many applications that require rapid and efficient data acquisition. The Singapore project mentioned at the beginning of this article is one such example.

Figure 1: Mobile LiDAR and imaging system used to map over 5,000 kilometres of road network in Singapore

Figure 3: Handheld laser scanning system
Data acquisition took place over a period of nine months, capturing over 600,000 million LiDAR points and 3 million images. An average of 30 kilometres of roads were captured daily. Over 45 terabytes (TB) of raw data was collected, with 15+ TB of processed data delivered to the client. As for the 3D models, the estimated number of features modelled includes:
• Over 126,000 traffic signs
• 11,700 light poles or lamp posts
• 43,000 bollards
• 100 Electronic Road Pricing (ERP) toll gantries
• More than 600 individually modelled pedestrian bridges
• 320 taxi stands
• 38,000 traffic signals or traffic lights
• 11,000 electronic control boxes
• Over 5,000 kilometres of roads and car parks
Data capture techniques are constantly evolving and improving. Drones, unmanned aerial vehicles (UAV) or unmanned aircraft systems (UAS) have seen a big shift back to photogrammetry as a means of data collection. AAM started business back in the 1950s, taking photos from aircrafts and taking measurements from them. The availability and ‘coolness’ of drones have seen people shift back to this technique, with one of the main differences being the platform and sensor used to capture the images. The underlying photogrammetric techniques are relatively unchanged. As with laser scanners, drones are simply ‘another tool in the box’ for modern-day geospatial professionals to utilise. Software packages are capable of fusing together thousands of images to create extremely detailed reality mesh models (see figure 5 for an example). Conventional measurements can still be made from these to produce 2D or 3D CAD datasets, with the extra added bonus of a new level of visualisation.
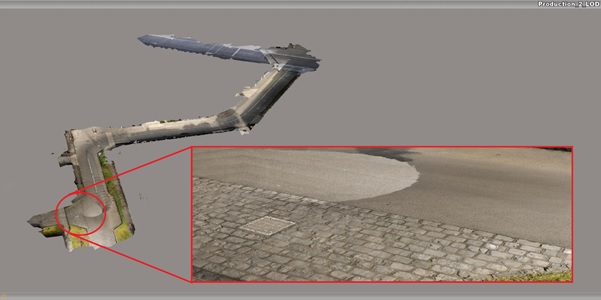
Figure 5: High-resolution 3D model produced using photogrammetric techniques
The most rewarding part of my job is engaging with clients to learn about the challenges that they are facing and designing solutions to assist. Executing these and seeing the results produced is my primary motivation. There is not a ‘one-size-fits-all’ approach, but to reference a common phrase I have used throughout this article—we have got enough tools in our kit to help.
Many clients come to me asking “Can I get a LiDAR survey” or “I need you to send out a UAV.” Both requests are referring to devices used to capture information. I always encourage end users to tell me what they need the data for—rather than what tool they want to be used for capture. It is then my job as a geospatial professional to recommend the best solution to meet their project needs. My take-home message for this article is that there are an ever-increasing number of ways to collect robust 3D information. Best results are achieved by focusing on the outcome—what you want to achieve with the data. This will in turn drive the process—which technology to use.
 DANIEL KRUIMEL
DANIEL KRUIMEL
Daniel Kruimel is currently a business development manager for AAM in Singapore, where he utilises his previous survey experience to provide 3D mapping and smart city solutions to clients in the South East Asian region. Kruimel has over 14 years of experience in surveying covering cadastral, engineering, topographic, construction and hydrography. Working in these areas has given him exposure to a wide range of technologies, including terrestrial scanning (static, mobile and handheld), GPS/GNSS systems, total stations and multibeam bathymetric sonars.






